CPM:Convolutional Pose Machines
人体关节之间是存在一定的关系的,传统做法是使用马尔科夫模型构建他们之间的关联。CPM 没有使用该方法,而是使用卷积去提取关节之间的关系。主要思路是将网络结构分为多个 stage,其中第一个 stage 会产生初步的关键点的检测效果,接下来的几个 stage 均以前一个 stage 的预测输出和从原图提取的特征作为输入,最后使用多 satge 监督网络训练
人体关节之间是存在一定的关系的,传统做法是使用马尔科夫模型构建他们之间的关联。CPM 没有使用该方法,而是使用卷积去提取关节之间的关系。主要思路是将网络结构分为多个 stage,其中第一个 stage 会产生初步的关键点的检测效果,接下来的几个 stage 均以前一个 stage 的预测输出和从原图提取的特征作为输入,最后使用多 satge 监督网络训练
总结. Net 的基础认识
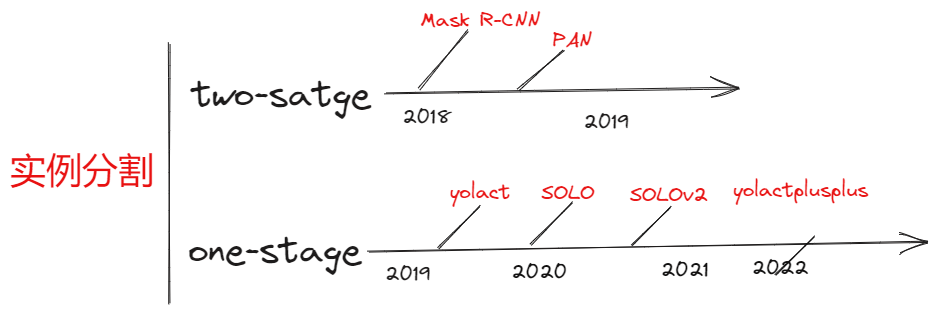
本文总结自己目前对实例分割 的认识,和学习过程
YOLACT (You Only Look At CoefficienTs) 是第一个用于实例分割的实时模型,首先通过类似目标检测模型生成 anchor 的预测结果 + 一批 prototype mask,然后根据 anchor 的结果线性组合 prototype mask 得到当前目标的 mask
本文总结如何在 CSharp 调用动态链接库
yolactplusplus 通过引入可变形卷积、使用更多的 anchor、重新生成的 Mask scoreing 分支等措施,改进了 yolact 模型
SOLO 是实例分割全新赛道的论文,以前的方式是先检测出实例框,然后在实例框内分割目标,而 SOLO 基于最后一层 featrue map (SxS) 位置确定实例,然后通过 mask 分支生成 S^2 个 mask, 表示最后一层 featrue map (SxS) 所有 grid 对应的分割结果,汇总所有 grid 的结果,就是实例分割结果
SOLOv 2 是在 SOLO 的基础上设计的网络,主要是将 mask 预测分支解耦成掩码核预测(Mask kernel branch)和掩码特征学习(Mask
feature branch),分别负责生成卷积核和需要卷积的特征映射,使得 mask 分支生成速度更快,最后也提出 Matrix-nms 快速过滤结果
目标检测中样本匹配发展过程